
円盤付循環型パーツフィーダで ワークを効率的に分離・回収

ビジョンカメラでワークの 姿勢を瞬時に認識しロボットへ の吸着指示を自動生成

エンコーダ搭載で 円弧トラッキングを実現 正確なピッキングが可能

従来のパーツフィーダでは 難しかった形状や ワークにも対応

![]()
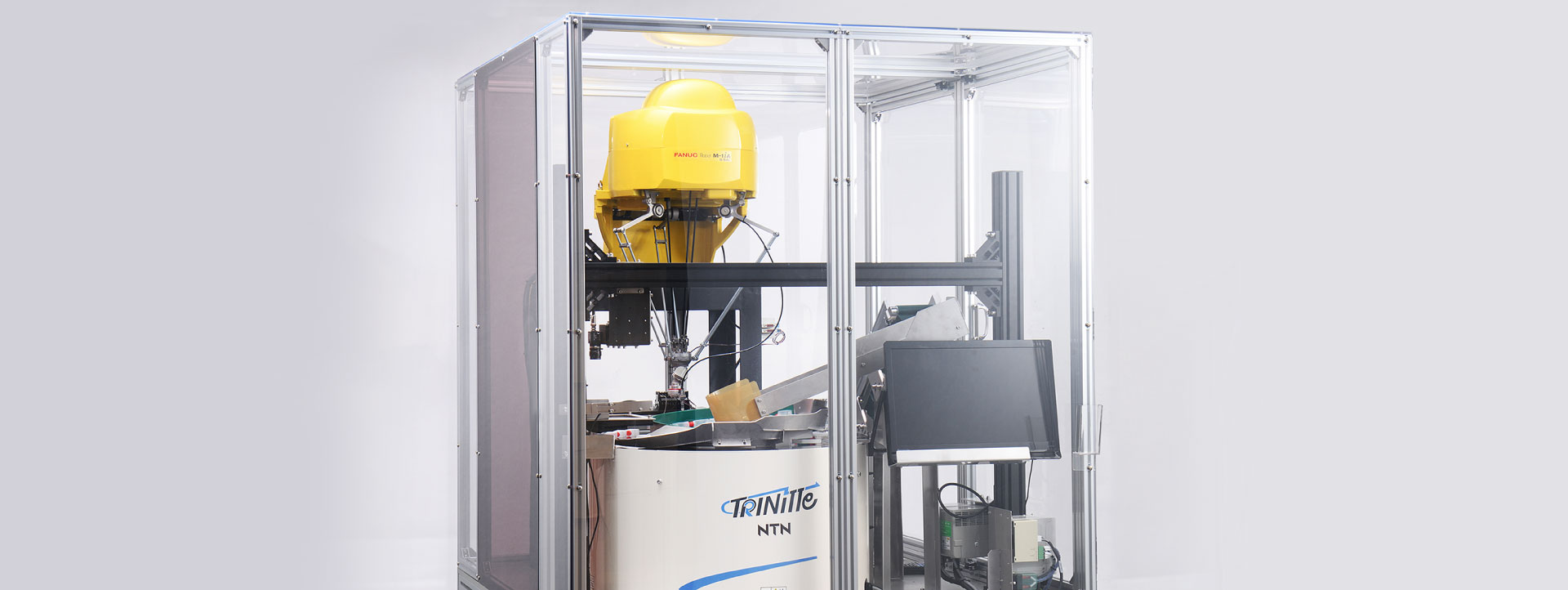

ゲンコツロボット+TRINTTEによるロボットピッキングフィーダシステム
円盤付循環型パーツフィーダで ワークを効率的に分離・回収
ビジョンカメラでワークの 姿勢を瞬時に認識しロボットへ の吸着指示を自動生成
エンコーダ搭載で 円弧トラッキングを実現 正確なピッキングが可能
従来のパーツフィーダでは 難しかった形状や ワークにも対応
 標準仕様
標準仕様


ロボットピッキングフィーダ(TRINITTE)
TRINITTEは各種エンコーダの取り付けが可能でコンベヤトラッキング(円弧)による正確なワークピックアップを実現します
そのため直進フィーダやコンベヤが不要で省スペース設置が可能です
またボウルは基本的な選別機構のみで構成されておりさまざまな形状のワークに対応する高い汎用性を持っています
段取り替え時間の大幅な短縮が可能で幅広い生産ラインに柔軟に対応できます
さらにシュートやエスケープが不要で詰まりによるトラブルが少なくワークを取り逃がしてもボウル内で回収され循環し続けるためロボットは休むことなく安定して作業を続けられます
